Computes the TWI based on a simple Monte-Carlo simulation approach to account for uncertainties/inaccuracies of the DEM. It computes the TWI n times by adding a given probability distribution (STD) to the original DEM, and delivers the mean TWI of all model runs. The AML will stop if (I) the number of iterations (N) is reached or (II) the difference between two iterations gets smaller than a threshold value. The threshold is computed by dividing the STD by N.
Reference: Reuter (2004) Spatial Crop and Soil Landscape Processes under special consideration of relief information in a loess landscape. ISBN 3-89959-238-7 via amazon or direct http://www.der-andere-verlag.de/
INPUT
Input Data - DEM (Raster Dataset) - a grid representing a continuous surface

COMMAND
Command Call window with Default seetings specified. For SRTM DEM specify a standard deviation value of 15m is appropiate, GDEM V1 should be specified similar, for an airborne Lidar DEM the uncertainity is usually in the range of 0.15m (e.g. 15cm, 1.5 dm). If you specify an value not appropiate to your DEM your result will probably look like salt and pepper apperance (already one can see it in the results below) and not represent anything usefull.
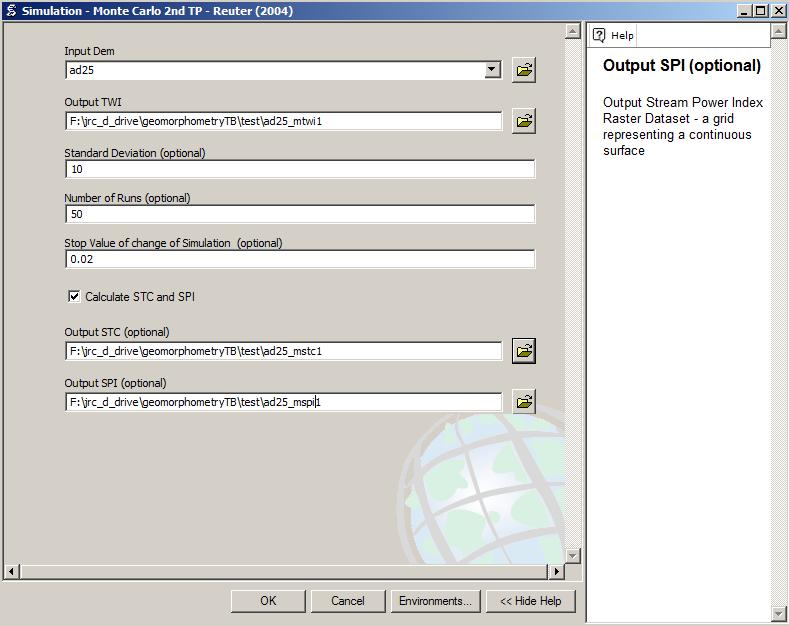
Standard Deviation: - Error Values of the DEM. For SRTM use a value of 16, for LiDAR ~ 0.15, GDEM ?
Number of Simulation: Specify how many runs should be performed.
Stop Value: For each iteration the difference in change will be calculated. If this difference is smaller than the STOP value; the MC-simulation will be stopped before reaching the specified number of simulation runs.
RESULTS
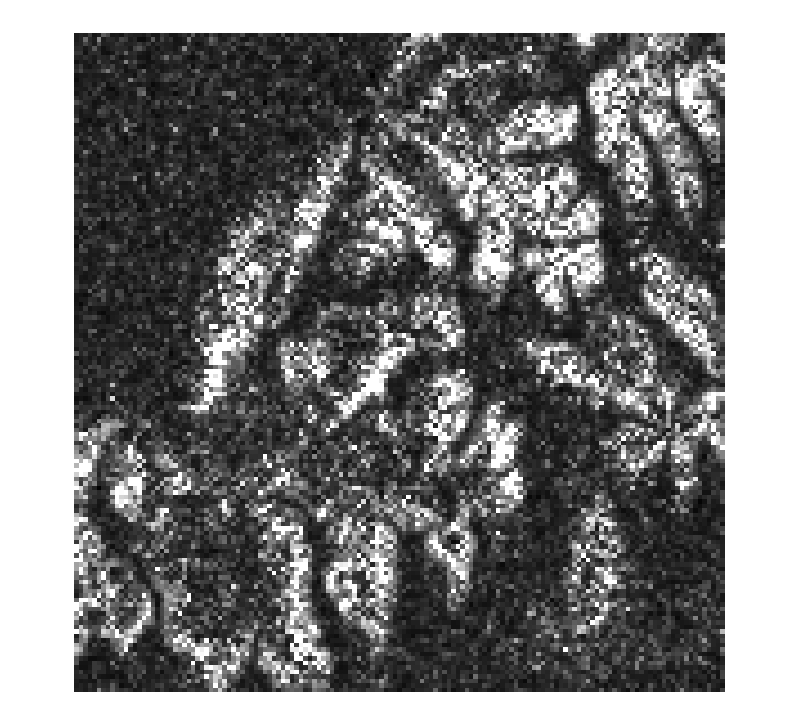
Monte Carlo simulated TWI
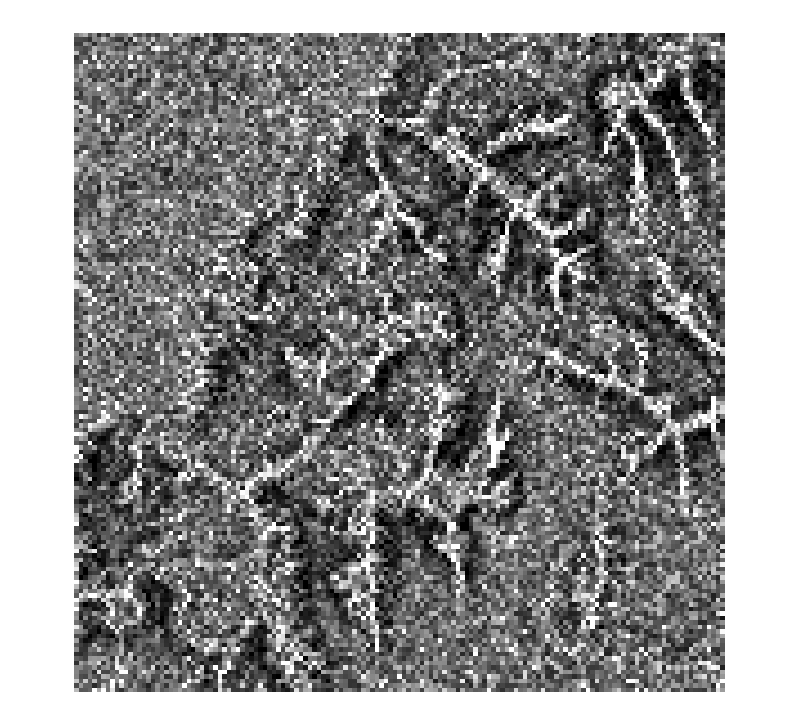
Monte Carlo simulated STC
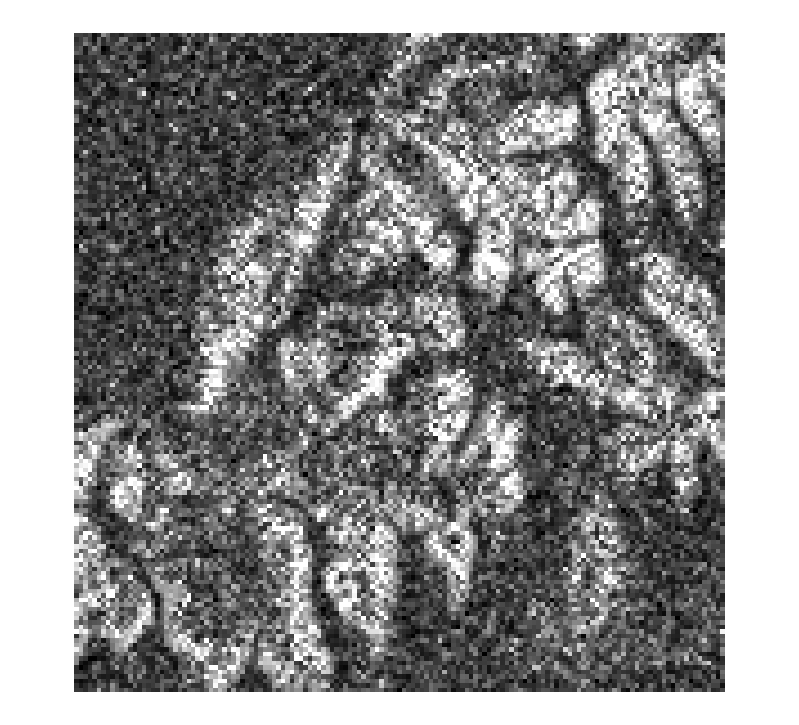
Monte Carlo simulated SPI